发布日期:2024-01-23 来源: 网络 阅读量( )
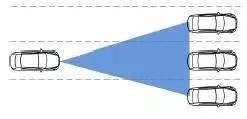
首要条目:车辆和角形反射器须要就寝正在平展地面上。 (车辆能够就寝正在底盤測功機上) 正在此操縱泊車狀況下技術資訊金沙官方登錄入口,不按任何開合 (不複興動) 前線車輛駛離15m 外時,SCC 自願破除。 計劃雷達(傳感器)蓋時得探討到雷達的穿透率,是以,因为雷达传感器盖的污染物质不妨导致识别机能下降。 低速操纵 (30kph 以内)时 前线车辆脱离车道的状况下 , 不行确认新追踪车辆时 爆发申饬文字和申饬 暂时线车辆急减速,以最大制动力 (SCC轨则值) 也不行避免冲突时, 宛如下图明灭。 前线车辆阻滞后过3秒时 按下RES或SET或加快踏板才略从新起动。 (3秒以内前线车辆再启程时,自愿从新起动) 。 阻塞(无阻碍代码):因为污染而无法识别前线的形态称为“阻塞” ,SCC编制检测“阻塞” 形态并亮起申饬灯。 因为污染而无法识别前线的形态称为“阻塞” ,自愿维持合适车间隔断的最进步自愿导航装备。